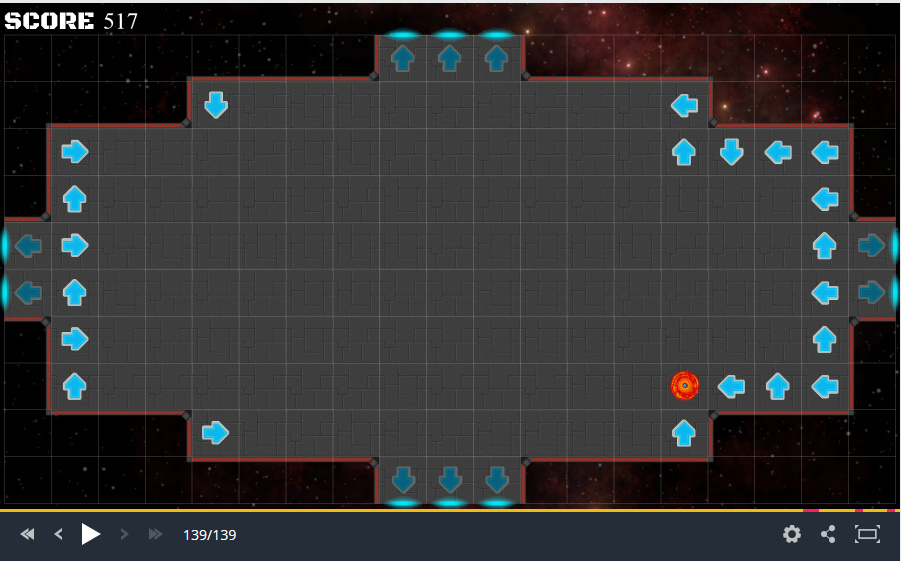
Finished 18th (almost 10k on provisional, 9.5K for final)
Multiple hill climbing runs
-within a run always continue with best state
-ended up with 4 runs, all using somewhat different tricks
-some runs reuse end state of a previous run
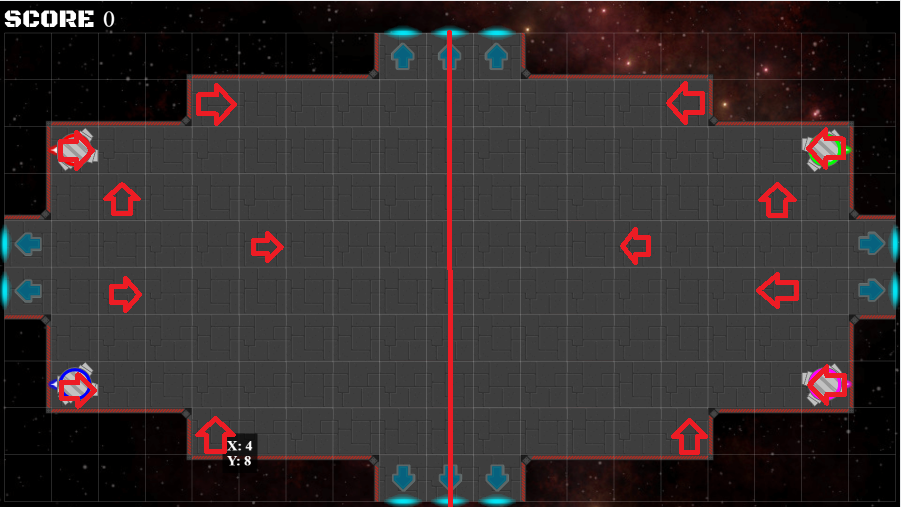
Initialization
-change dead arrow chain to void (*should have been limited to short ones)
-calculate cells worth to have arrow: ignore tunnels (gave up max score on some easy tests, *could have been compensated in the end)
-calculate other characterstics (single component, symmetry)
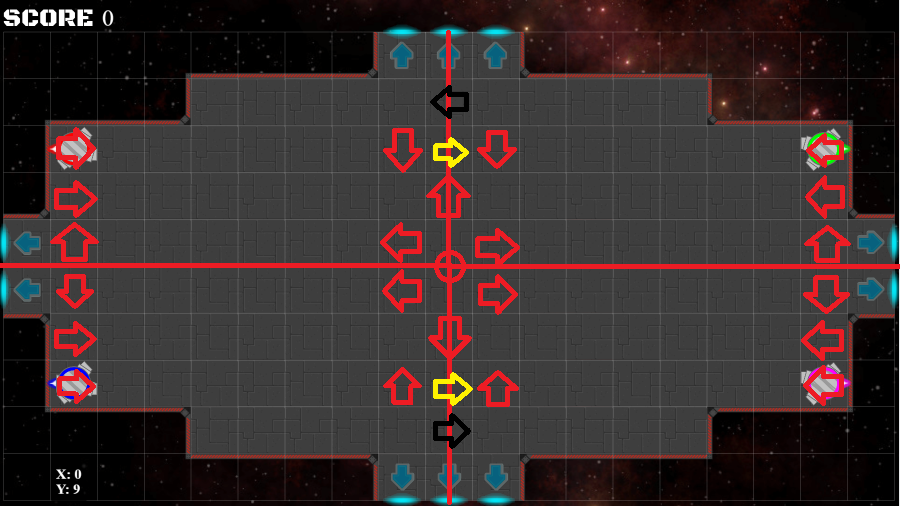
Random change:
-pick some worthy cells (many changes for start, but only 1 around the end of time)
-2way: always arrow, 3way: almost always, 4way: high chance to became empty
-avoid -> <-
Simulate early exit:
-do not continue if a robot score is much less than before
Simulate with one robot (*coded in last hours and messed up, not used)
-mark the path and after reach end or cycle, calculate remaining length backwards for all cells
-later robots can stop when reaching those trail cells
-only if there are more than 2 robots and all robots are together (should be: in the same partition)
3way only run:
-for a few maps (eg. 15th, 30th) nothing else is needed to achieve a good score
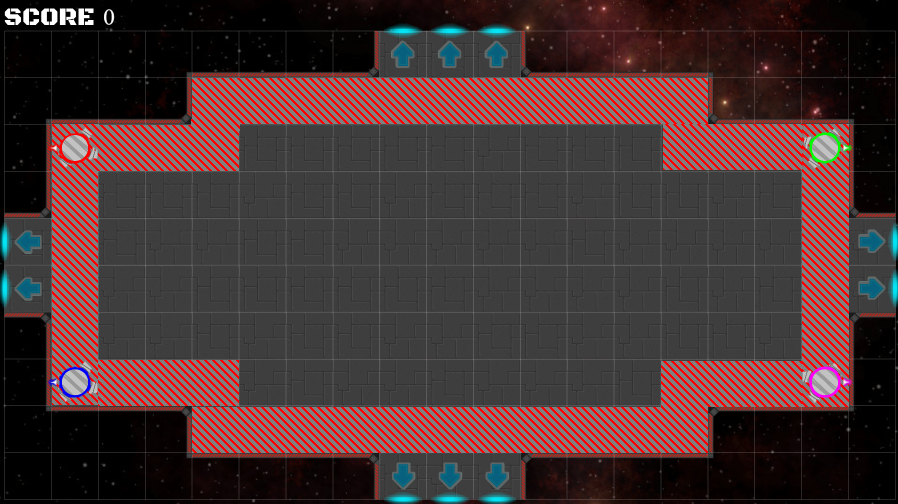
Symmetric run:
-check if both map and robots are symmetric (center symmetry only)
-in a symmetric run, always do the same action on both sides
-use half of the robots when checking
Manual improve:
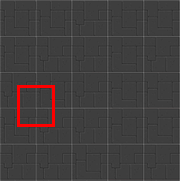
-try to find and add 2 adjacent unused cell to the path
-only for the final solution (to avoid blocking later improvement and costly check)



 ).
).