Thank you It worked out. Though I don’t get the use of putting these spaces in between. Do you know why ?
print(str(next_checkpoint_x) + " " + str(next_checkpoint_y) + " " + str(thrust))
Thank you It worked out. Though I don’t get the use of putting these spaces in between. Do you know why ?
print(str(next_checkpoint_x) + " " + str(next_checkpoint_y) + " " + str(thrust))
The spaces are needed so that the game engine is able to read your three outputs and distinguish them from each other.
I get it, thank you very much for your help !
Can we please have some clarification as to how the angle is measured?
the tutorial suggests + and - angles, where a circle would only have + from 0 to 360.
so are we suggesting that its 0 to -180 and +180 ? can we add this info to the tutorial as its rather vital
Hey! We’re not talking about the angle of your pod in a circle, but about the angle between your pod orientation (in blue) and the checkpoint direction (in red):
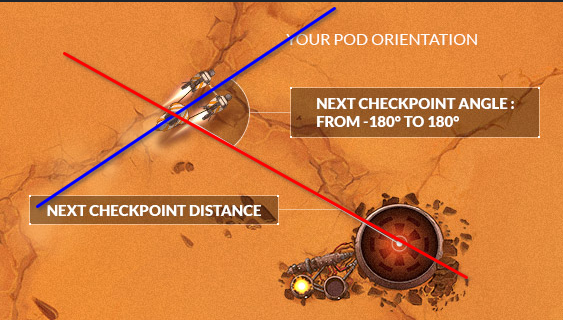
So of course an angle greater than 180° is possible, but it can be expressed “rotating in the other way”. So an angle of 200° can be expressed as an angle of -160°, which has the advantage to give you an information about the rotation direction.
How i debugged it was to record the relation between past coordinates with new coordinates(velocity) and the angle to the next checkpoint. This can be used to calculate your trajectory prediction/drift.
You can use cerr << “Steering to the left X amonut from next checkpoint when drift is going right”
or something. The cerr debug output is really the best way to debug, output your variables if you really want tot know what they are and how your logic is handling them
I don’t understand what the hell i’m supposed to do here! Worst introduction ever. My pod only flies to the left upper corner.
Your goal is to finish the race first by passing through the multiple checkpoints of the track. You control the direction (x and y coordinates) and the thrust (an integer between 0 and 100) of your pod. To do that, you have to update the code which prints/outputs to the console, which also serves the purpose of sending the coordinates and thrust info for the pod to follow and move accordingly.
Reading the hints and following the tutorial will help you understand the task.
can sommone tell me how in hell its possible like how do you want to put something new but no i cant finish the 2
its says that trhust is not a command and it dosent mean anyting
As discussed with you in the chat, you have to know the basics of a programming language first, then you can make use of the pseudo-code hint in the puzzle statement to draft the solution.
Hello, yesterday night i got the 1 place in the silver league and beat the boss, but i still not promoted in the golden league, and havent get any message of promoting soon, i waited for a day but nothing happened
is this bug or something, can anybody help me with that
image with my rang:
Can someone give me an example how to use a neural network for this task? (in “what you learned” it says “neural network”, so I figured one can use it here?)
You can find some explanation of an implementation here: https://github.com/pb4git/Nash-DQN-CSB-Article
I’ve unlocked you, you should be promoted now
Hi !
I saw that it is written neural network. So I was wondering, how can we implement it as we have only one game every time ?
I think you may have to find the suitable variables and weights by training outside CodinGame, then plug them in directly in your bot code inside CodinGame.
Is there a source code for this game anywhere available? I’d love to train a neural net on it locally.
how did you beat the boss? I haven’t made it higher than rank 200 so far.
i used trigonometry to set the point perpendicularly further, distance from the point was calculated by using P regulator from PID of checkpoint and also used 1 move predicting code to measure opponent speed and calculate next position to activate my shield
